نظام الي لتوضيب العلب الحليب
Automation system for packing cans of milk
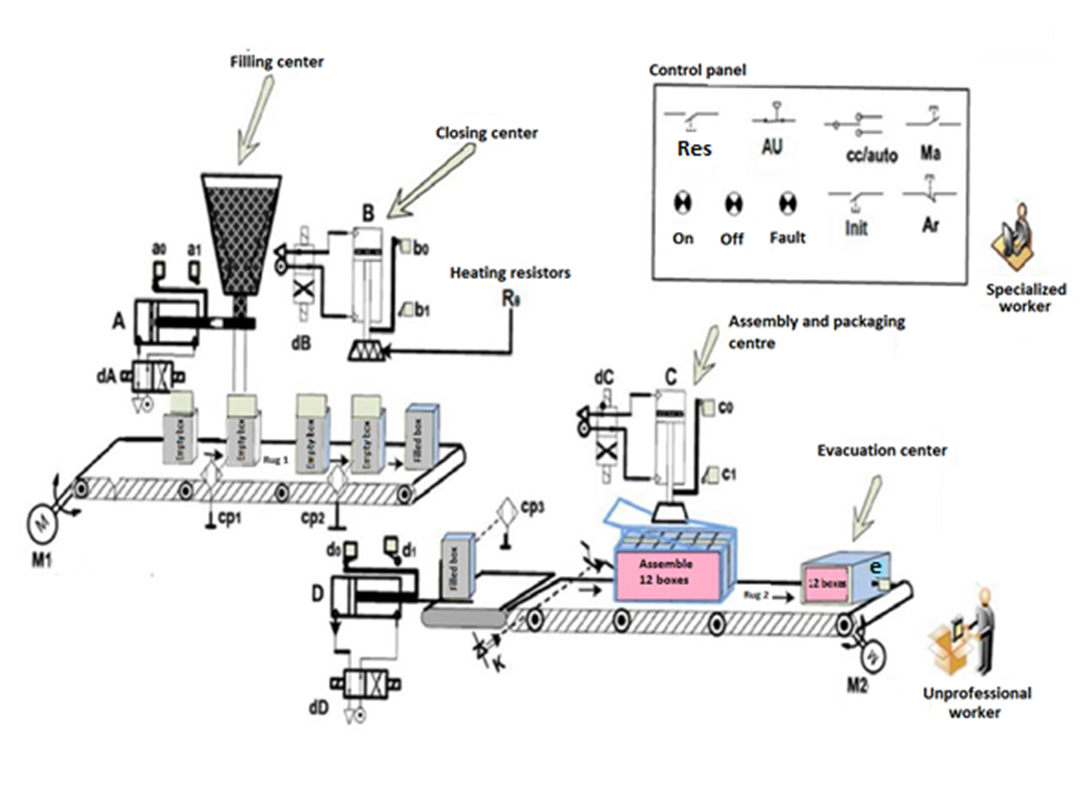
The objective: to fill and close the milk carton continuously (Figure 1). While respecting the hygiene and profitability requirements of the food industry, the processing is subject to quality standards and a high production.
Fig(1)
Operation description: In the initial state, empty plastic-coated cartons, pre-prepared milk and boxes are prepared, When pressing button Ma causes the motor M1 to start, To transfer an empty can to the filling center and another filled to the closing center, the presence of an empty can is detected by Cp1 and a filled can by Cp2 at the same time, both or one of them.
1. The filling process begins if (Cp1 = 1) the tank is opened using cylinder A for a duration of t1 = 20 s, then it is closed by returning cylinder A to the initial position.
2. The closing process begins if (Cp2 = 1) by using the cylinder B to fold the cover, and when pressing b1, the resistance R0 works for t2=7 s to obtain a good closing, then the cylinder B returns to the initial position.
3. The assembly and packaging process begins if (Cp3 = 1) by using the cylinder D to push the can in to the box and count it.
4. The presence of 12 filled cans in the box leads to it being closed using the cylinder C, then he is transported with mat 2 to the evacuation center, where he is detected by e and an audio alert is issued to evacuate him manually.
Exploitation: The production line requires 3 workers, one specialized (operating, driving, monitoring and maintenance), 2 without specialization for the process of bringing in cans and evacuate a boxes.
Ma: cycle start
Auto/cc: automatic switch cycle by cycle
Ar: stop
Res: reset
RAZ: resize to zero
Au: emergency
Init : initial condition;
A ,B ,C,D double-acting cylinders (6bar)
(dA+dA-), (dB+,d, (dD+,dD-), (dC+,dC-)
of electromagnetic distributors (5,2)
M1 asynchronous motor 220/380 ~
M 2 asynchronous motor 220/380 ~
Questions : complete the following table; then propose the control and power circuits of this system.
